
涂志燕
安科瑞电气股份有限公司 上海嘉定 201801
摘 要:介绍了国、内外电动机保护器的发展现状和趋势, 叙述了网络化智能电动机保护器的体系结构、各个功能模块的实现原理, 以及相应的基于嵌入式系统的软、硬件设计。
关键词:电机保护;现场总线 ;嵌入式系统
0 引言
随着社会的发展和科技的进步 ,生产过程的自动化程度越来越高, 在生产中作为动力设备的电动机数量也越来越多, 如果电动机发生故障甚至烧毁, 会波及整个生产系统, 造成较大的损失。因此, 对电动机实行保护是保证生产系统正常工作的一项重要任务。由于现代工业生产的信息化、自动化程度要求越来越高 ,对电动机保护提出了越来越苛刻的要求。电动机保护器已从简单的热继电器、温度继电器、电子式保护装置的保护方式, 向智能化、网络化电动机保护器的方向发展。国内目前大多数电动机保护器没有通信功能,产品中有通信功能的也只是用简单的RS-485实现,应用层的协议没有统一的规范,不能满足现场设备所要求的一致性和互换性。基于现场总线的电机保护器还处于起步阶段, 国外公司如美国罗克韦尔自动化公司已开发出 Devi-ceNet可通信智能固态过载继电器。现场总线是工业自动化领域的发展热点, 它的出现势必会给传统的电动机保护器带来革命性的变化。能接入现场总线并实现网络化的智能电动机保护器接线简单, 其增强的故障诊断和监控功能 ,以及远程设置和管理功能是今后电动机保护器的发展方向。在众多的现场总线通信协议中,DeviceNet作为符合IEC国际标准的底层设备现场总线技术,已于2002年10月成为中国国家标准。DeviceNet现场总线具有开放、高效和低价等特点,特别适用于工业现场设备的互连。本文基于 DeviceNet现场总线技术阐述具有网络化功能的智能电动机保护器技术。
1 网络化智能电机保护器体系结构
网络化智能电机保护器主要完成对各种电机运行参数的检测、电机控制,以及通过网络将参数上传或下达 ,以便于上位机实时监控。保护器主要由保护功能模块和通信功能模块组成。保护功能模块对电机过压、欠压、过流、断相、电流不平衡等多种故障进行检测 ,并发出相应的控制输出指令 ,从而实现电机保护。由于电动机保护器工作在工业网络体系结构的设备层 , 通信功能基于DeviceNet现场总线实现。
保护器若采用单CPU方案可以使保护功能与通信功能集中于单一的软件控制系统上。PCB板空间更小 ,可靠性更高, 但其对微控制器的运算速度和各种资源 (程序存贮器、数据存贮器 、CAN控制器等)有较高要求 ,需要高性能的微控制器。若采用双 CPU方案, 可以让保护功能和通信功能分别由两个不同的微控制器完成,减小单个微控制器的负担,两个 CPU可以通过 DMA、串口 、双口 RAM等方式完成数据交换 。对微控制器的要求不高,可以使用一般处理器完成 。采用这种方案更重要的是有利于现有的无通信功能的智能保护器升级,在对现有设备通过少量改进后就能作为网络的一个节点接入现场总线控制系统, 以少量代价获得现场总线应用水平的大幅提高 。
本设计选用双 CPU方案, 用户处理器完成物理信号的输入、输出和检测转换 ,按预定的规律算法进行计算 、控制、处理, 实现保护功能 , Devi-ceNet处理器通过 DeviceNet现场总线与上位机进行双向通信 ,完成信息交换和简单的逻辑控制 。
1.1保护功能
电动机的常见故障可分为对称故障和不对称故障两大类。对称故障包括:过载 、堵转和三相短路等 ;不对称故障包括 :断相 、逆相、相间短路、匝间短路等 ,其特征是电机电流出现负序电流和零序电流。
1.1.1热过载保护
电机发热和散热过程较复杂 , 它与固定损耗(铁损和机械损耗 )及可变损耗 (转子和定子铜耗 )等多种因素有关 。假定电机是一个均质物体 ,可以计算平均温升 ,并用其估算温升。根据对电机发热过程的分析, 其热态平衡微分方程为
Qdt=Aτdt+Cdτ (1)
式中: Q———电动机单位时间产生的热量;
A———散热系数(表示温升为 1℃时, 每秒钟的散热量);
τ———温升 ;
t———时间 ;
Aτ———电动机单位时间内散热量 ;
C———电动机热容量 。
由式(1)解得,在初始条件为:t=0,τ=τF0时 ,电机某一时刻的温升由式(2)决定 :
τ=τL +(τF0 -τL )e-t/T θ(2)
式中: Tθ ———发热时间常数, 表征热惯性的大小,
Tθ =C/A;
τL ———稳态温升 ,
τL =Q/A;
τF0 ———起始温升 。
式 (2)表明, 热过渡过程中包括两个分量, 一个是强制分量 τL , 它是过渡过程结束时的稳态值 ;另一个是自由分量 (τF0 -τ L )e-t/Tθ , 它按指数规律衰减至零。
由此可知,在电机发热保护中应解决的问题有 :热累积采用模拟电机发热曲线的方法 ,针对不同的脱扣级别采用不同的发热曲线 ;散热过程采用模拟指数函数曲线衰减方式, 可较为真实地反映散热过程 ,也可根据经验公式对上述指数曲线进行简化处理以便于实现发热保护 。
1.1.2接地故障保护
电动机接地故障主要是过电压所造成的绝缘受损, 主要表现为相线与电气装置的外露导电部分 (包括电气设备金属外壳 、敷线管槽及构架等 )、外部导电部分 (包括金属的水 、暖、煤气 、空调管道和建筑的金属结构等 )及大地之间的短路 。这种故障与相线和中性线间的单相短路故障不同, 与相线之间产生的相间短路也不同。接地故障与一般短路相比 ,具有更大的危险性和复杂性 ,因为这类故障可能引发火灾并对人身安全构成威胁 。接地保护与漏电保护不同。一般来说,接地电流比漏电电流更大, 前者可以通过对保护器内部互感器所测得的三相电流进行矢量和计算求得, 也可以采用漏电电流互感器 (零序互感器 )直接检测。对于较小的电流, 由于采用零序互感器更为准确和可靠 ,故漏电保护信号必须取自零序互感器。
1.1.3堵转保护
异步电动机刚开始起动时 , 由于种种原因(机械故障、负荷过大、电压过低等)转子不能正常起动 ,使转子始终处于静止状态(s=1.0, s为转差率),这就是通常意义下的堵转。异步电动机在起动过程中除 s=1.0为堵转外, 由于某种原因使电动机运行在转速很低的状态下 ,达不到设计的额定转速 ,也是一种堵转状态 。异步电动机在正常运行中 ,由于机械故障将转子卡住或者负荷急剧增加、电压突然失去等原因也可能使转子转速迅速下降 ,运行在一个很低的转速下甚至完全停下来 ,造成电动机堵转 (或称运转中的堵塞 )。发生堵转的电动机,电流很大, 散热条件差造成温升急剧恶化 ,特别容易烧毁电动机 。保护器的堵转过流保护特性值应包括 :不动作电流设定值 、动作电流设定值、动作延时时间、误差范围。哪些参数可由用户设定 ,因产品不同而有所差异 。
1.1.4断相及三相不平衡保护
断相故障是一种不对称故障 , 也是一种比较严重的故障 ,因此电动机的断相保护也非常重要。由于电动机绕组接法有 Y形和 Δ形两种, 因此对电动机断相不平衡的判别要根据负序电流及三相电流的不平衡率来综合判断 。考虑各种误差和各种断相时电流的不平衡率 , 现场应用中以大不平衡率 δ>30%作为断相及三相不平衡故障的判定依据比较妥当。δ可由 δ=(IH -IL )/IH×100%≥30%得出, 式中:IH 为三相电流大值;IL 为三相电流小值 。
1.2通信功能
智能电动机保护器一般在总线中只扮演从站的角色 ,通信中只需实现预定义主从模式的组2从站协议 , 即可满足绝大多数场合的需求。在通信设计中, 一般硬件由微控制器、CAN控制器 、CAN收发器等器件组成 , DeviceNet应用层协议由软件实现, 这个关键是对应用层协议规范的消化和理解 ,是开发的难点和重点。
目前,市场上可提供针对组2从设备开发的专用芯片DN1022, 基于此在了解 DeviceNet协议的基础上可以迅速完成 DeviceNet从站设计。DN1022具有内置的 CAN口和 DeviceNet处理引擎 ,高速串行口、并行口、配置口和开关量输入 、输出口, 用户处理器可通过高速串行口或并行口与DN1022通信, 只需实现一个简单的通信协议即可 。其内部实现的协议为 DeviceNetGroup2 OnlySlave,其主要技术规格为:支持的 DeviceNetConsumedI/O为 64字节, ProducedI/O为 64字节 ,支持 POLL、COS、CYCLIC三种数据触发方式、支持 DeviceNet参数对象、内置 CAN控制器。该芯片可以工作在配置状态和运行状态 ,工作在串口方式下时 , DN1022提供 8个串口命令让用户处理器在配置状态完成配置, 切换到工作状态后完成保护器实时数据及配置参数的数据交换 。
2基于 DeviceNet现场总线的智能电动机保护器
网络化智能电动机保护器是典型的嵌入式系统 ,其设计遵循嵌入式系统的一般方法。
2.1 硬件设计
考虑到网络化智能电动机保护器需对电机过压 、欠压、过流、断相、电流不平衡等多种参数进行保护, 且对实时性有一定要求, 同时其工作在恶劣环 境 下 , 因 此 选 择 了 美国微星公 司 的dsPIC30F6012作为主控制器 , 它集成了单片机的控制功能及数字信号处理器(DSP)的计算能力和数据吞吐能力, 有 16路 12位高速 AD转换器和UART,看门狗定时器等, 可以很好地满足设计要求 ,系统的硬件如图 1所示 。
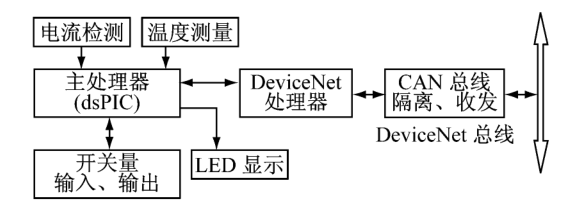
图 1 智能电动机保护器硬件框图
2.1.1电源部分
由于 DeviceNet总线供电, 所以保护器电源取自总线电源 ,根据硬件设计中处理器 、运放 、传感器等用电情况, 设计出 +12 V、 +5 V等电源模块 ,且电源有反向保护功能 。
2.1.2 DeviceNet通信模块
DN1022内部集成 CAN控制器 ,在 CAN控制器和物理总线之间需要 CAN总线收发接口电路,为了提高抗干扰能力 ,一般需要用高速光耦器件隔离。
2.1.3电流检测
利用霍尔器件进行电流、电压的转换 ,所选器件及铁心尽可能地保持线性关系,对其进行去直流分量 、取值处理和限幅处理后 ,送到处理器进行 AD采样处理。
2.2软件设计
对于大中型的嵌入式系统, 由于存在复杂的实时编程、时间受控和事件受控进程设计的问题,为了简化程序设计的复杂性, 很多系统都采用了实时操作系统 (RTOS)。由于本网络化智能电动机保护器采用双 CPU结构 ,在某种程度上简化了对这些因素的考虑, 软件设计不采用 RTOS。本软件设计采用主程序加中断处理程序的框架, 在设计中尽可能的做到模块化 , 采用 C语言编程,提高软件的复用性,方便升级和移植 ,软件开发工具使用微星公司提供的集成开发环境、C语言编译器和调试工具 。
电流采样、温度采样使用定时器中断完成 ,保证了每次采样的时间间隔精度 , 对采样到的值在主程序中有针对性的进行软件非线性校正, 对得到的数据使用精确算法分析, 从而对电动机实行保护控制。与 DeviceNet处理器采用串行口通信,主处理器采用定时器以一定时间间隔向 Devi-ceNet处理器发送命令帧,从而完成向总线发送保护器实时数据和从总线得到配置数据的工作 。在软件设计中解决了多项保护程序模块和通信程序模块的有机结合,优化软件设计,使整个系统的运行效率得到提高。
3 安科瑞智能电动机保护器介绍
3.1产品介绍
智能电动机保护器(以下简称保护器),采用单片机技术,具有抗干扰能力强、工作稳定可靠、数字化、智能化、网络化等特点。保护器能对电动机运行过程中出现的过载、断相、不平衡、欠载、接地/漏电、堵转、阻塞、外部故障等多种情况进行保护,并设有SOE故障事件记录功能,方便现场维护人员查找故障原因。适用于煤矿、石化、冶炼、电力、以及民用建筑等领域。本保护器具有RS485远程通讯接口,DC4-20mA模拟量输出,方便与PLC、PC等控制机组成网络系统。实现电动机运行的远程监控。
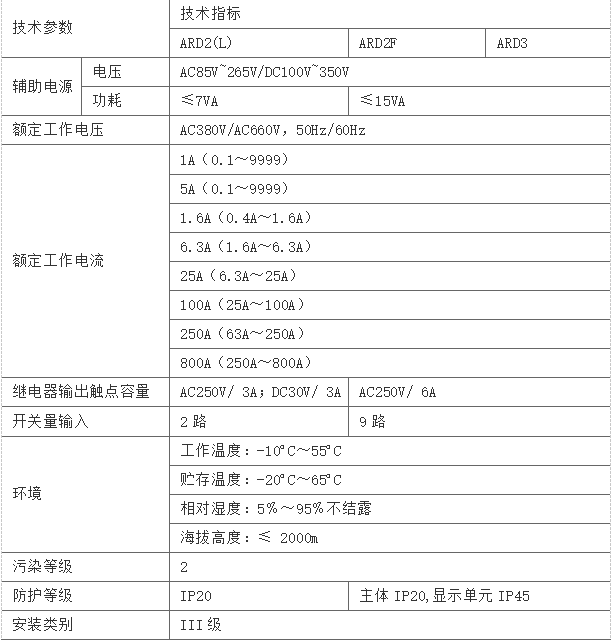
3.2技术参数
3.2.1数字式电动机保护器
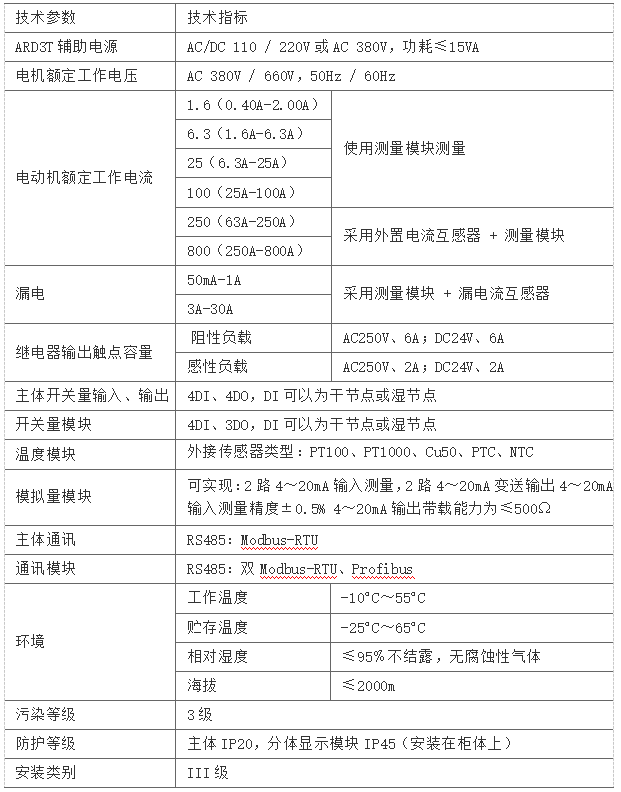
3.2.2模块式电动机保护器
3.3 产品选型
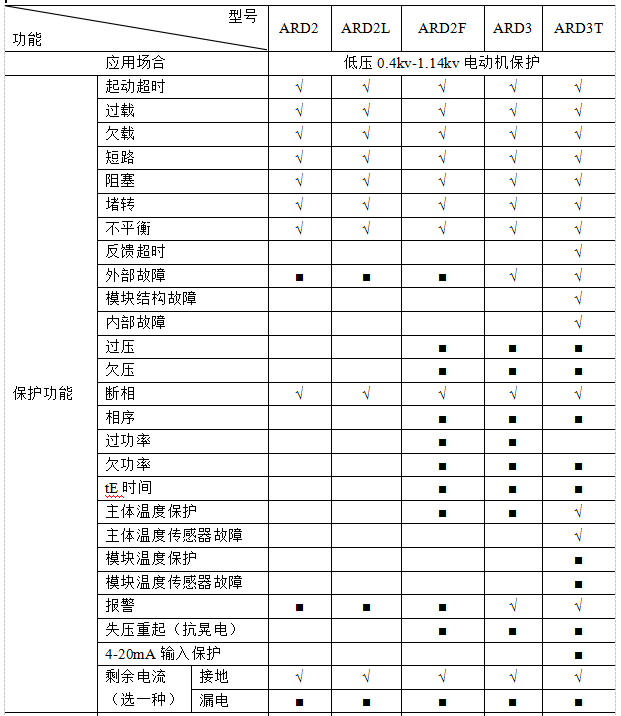
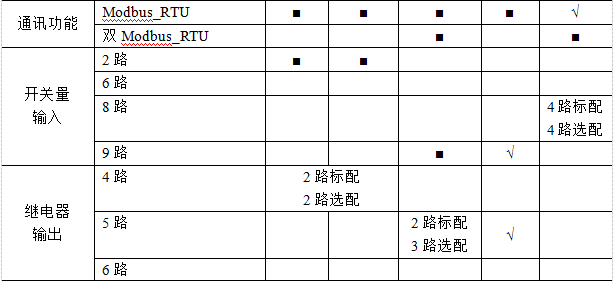
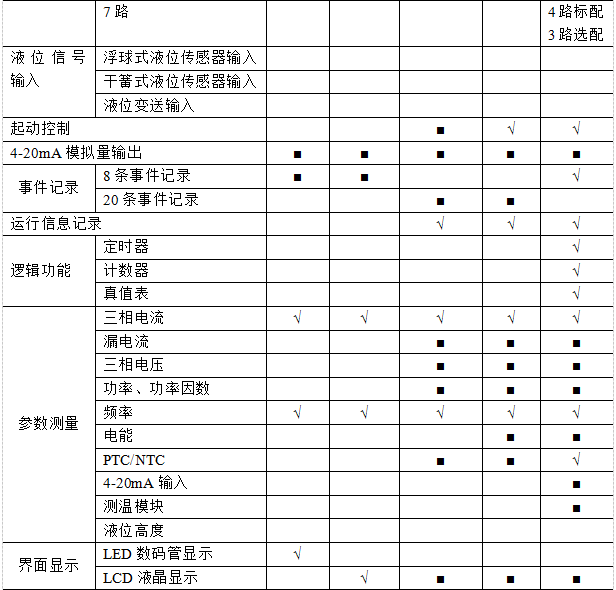
说明:“√”表示具备,“■”表示可选。
4结语
在完成开发后, 针对电动机保护器的 Devi-ceNet设备描述,编写设备的 EDS文件, 方便上位DeviceNet配置软件对网络的配置 ,在此基础上还须通过一致性测试。可通信智能电动机保护器是构成智能化 、可通信电动机控制系统的关键元器件之一 ,其适应了自动控制网络化的要求 ,代表了电动机保护器的发展方向。 DeviceNet现场总线具有开放 、低成本、高效率和高可靠性的优点, 是流行的底层设备现场总线, 基于此实现传统设备的组网具有很大的现实意义 。
参考文献
[1]胡景泰,朱文灏.多功能的可通讯智能电动机保护器[J] .中小型电机, 2004, 31(3):33-38
[2]王秀华 .网络化智能电机保护器的设计
[3]安科瑞企业微电网设计与应用手册.2019.11版
作者简介:涂志燕,女,安科瑞电气股份有限公司,主要研究方向为智能电网供配电,邮箱: 2881392116@qq.com,手机:1872111382(同微信),QQ:2881392116