

仇婉蓉
安科瑞电气股份有限公司 上海嘉定 201801
摘要:随为解决电动汽车充电站总线通信问题,设计了一种基于塑料光纤( POF,Polymer Optical Fiber) 通 信总线的电动汽车充电桩/站监控系统。研究了塑料光纤传输介质的通信特性,开发了POF与CAN 总线的 POF-CAN 转换模块。结合电动汽车充电站装置应用,设计了相应的硬件系统、嵌入式软件和 POFCAN 系统应用层协议。在实验室环境下搭建虚拟充电站测试平台进行验证实验,结果表明该系统能够满足对实时性、可靠性的要求,且具有抗电磁干扰、施工维护灵活经济的特点,为提高电动汽车充电站监控系统的可靠性和抗干扰性提供了一种新的解决方案。
关键词: 塑料光纤; CAN 总线; 数据监测; 充电站; 电动汽车
0引言
充电桩/站为电动汽车提供续航保障,是电动汽车 发展产业链上的重要环节。充电站内的监测管理系统 是运营商实现自动化管理的途经。充电站建设具有控 制点面多、面广和数量分散的特点。综合考虑电动汽 车充电桩( 站) 的设计方案通信传输的可靠性、经济 性、灵活性等方面开展研究与设计具有重要价值与意义。
对于电动汽车充电站监测系统,目前已有较多已公开的研究成果。文献[1]提出一种基于无线通信和云存储的充电桩管理系统,其优点在于灵活便捷、易于维护,但未对电网中的负载波动与谐波干扰对通信可靠性造成的影响进行分析; 文献[2]提出使用 CAN 总线的智能充电桩监测与控制通用系统; 文献[3]提出一种基于 RS485 串行总线的电动汽车充电站配电监控系统,均采用了传统的铜类介质传输通信方式,在灵活性和抗电磁噪声方面仍存在不足,而且铜类介质在现场布线时,由于要考虑多节点共地的问题,后期维护成本高,经济性较差。
与传统光纤相比,塑料光纤是一种以高分子聚合 物材料为传导介质的导光材料[4],适于在空间狭窄区域布线,架设成本低。POF 具有线径细、易弯折( 弯折半径在 30 mm 内) 的特点,具有很好的走线灵活性。 同时,考虑到充电站内大功率电能变换设备产生的电磁噪声可能对通信系统造成影响[5 - 6],而 POF 传输的是光信号而非电流信号,可以从原理上避免外部环境 对传输线路的电磁干扰。
本文针对 POF 的传输特性进行了实验测试,进一步论证了 POF 在短距离通信系统中的适用性和成为 电动汽车充电站监测系统传输媒质的可能性。并根据POF的物理层传输特点,结合 CAN2.0协议,开发了 POF-CAN 转换模块,设计了一种基于塑料光纤通信总 线的电动汽车充电桩/站监控系统。
1 POF 传输特性研究
在以双绞线为传输介质的 CAN 总线通信系统中, 为了抑制电气系统中的共模干扰,需要通过专门的 CAN 收发器芯片将 CAN 控制器的 CAN_TX 和 CAN_ RX 电平信号转换为 CAN_H 和 CAN_L 差分电压信号 进行传输。而在以 POF 作为传输介质的通信系统中,则不需要考虑共模干扰的问题。
在 CAN2.0 规范中,只针对物理信号子层进行定 义,并没有针对物理层驱动/接收器特性的相关规定, 因此可以根据不同的物理层应用对发送媒体和信号电 平进行优化。为了满足 CAN 协议的上层设计规范,必 须针对 POF 的物理层传输特点进行研究。
根据 POF 在不同波长下的衰减率变化曲线,从而决定 POF 总线的传输、转换器件的工作波长。采用截断法通过光检测器进行 PMMA 塑料光纤衰减率测试, 得到 PMMA-POF 传输特性如图 1 所示[7]。
根据图 1,进一步精确测得在可见光波长范围内 PMMA-POF 在 500 nm、570 nm 和 650 nm 处的 3 个低损耗窗口,详细参数如表 1 所示。
根据测试结果,综合考虑光电器件成本等因素,选取 650 nm 波长的红光波段作为时分复用的 POF-CAN

图 1 PMMA-POF 传输特性曲线

总线工作波长。对以 POF-CAN 为传输方式的单节点 而言,发送信息时必须将 CAN 控制器的 CAN_TX 电平信号转换为一定功率电流信号,以驱动 POF 专用的光电发送器模块实现电信号到 650 nm 波长光信号的转换。在接收信息时,则需要将光电接收器输出的电信号转换为控制器工作电压的 CAN_RX 电平信号。因此,在 POF-CAN 通信层可以省去 CAN 收发器,通过设计专门的接口电路实现 POF-CAN 组网连接。
2 POF-CAN 驱动/接收器开发
在环形光纤 CAN 总线网络中,不同节点之间通过光纤单环网通信,设备和节点之间通过 CAN 控制器通信。CAN 控制器与总线之间采用逻辑控制单元( Logic Control Unit,LCU) 替代传统的 CAN 总线收发器,能消除环形光纤 CAN 网络的阻塞问题[8]。在环网拓扑结构中,当节点处于发送状态时,CAN 控 制 器 发 出 的TTL 电平通过接口电路到达光信号发送端,信号沿光纤环网传输一周后回到源节点光信号接收器,并由CAN 控制器的数据接收端接收数据。此时,POF-CAN接口电路需要将接收数据与发送数据通过 LCU 进行比对,判断接收到的数据是否由该本点发出,进而决定是否中断数据流。根据逻辑控制单元结构设计,当电路的设计时延 Tdelay满足如下关系时,发送状态下的节· 911 · 基于 POF-CAN 通信总线的充电桩/站监测系统的设计点可以剔除环回的发送报文:
Tbit > Tdelay > Tring ( 1)
式中,Tbit为位时延,其值取决于通信传输的波特率; Tring为环网时延,即信号传输一周回到源节点的时间。考虑到光在传输介质中的传输时间远小于光电收发器的转换时延,因此在计算 Tring时忽略 POF 线路中的传输时延,仅考虑器件光电转换的时延。则环网最大传输时延的估计值为与器件参数和网络节点数有关的函数:
Tring = n × MAX[tProDly - LH,tProDly H ( 2)
式中,n 为网络节点数; tProDly-LH为信号低电平 - 高电平的光电转换时延; tProDly-HL为信号高电平 - 低电平的光电转换时延。tProDly-LH和 tProDly-HL均由器件参数决定,可
通过实验测得。
采用 650 nm DC-5MBd 的 FT05MHNR /FR05MHIR收发器,具备总线逐位仲裁和环网逻辑控制功能的POF-CAN 驱动/接收器电路如图 2 所示。
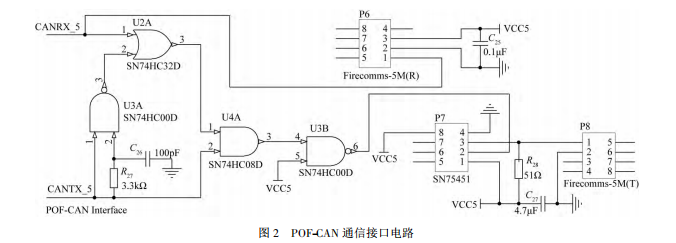
图2中,LCU 部分采用基于 SN74HC 系列逻辑芯片的电路。SN75451 为高速电流外设驱动器,用于将小功率 TTL 电平信号转换为提供给光发送器驱动电流,通过调节串联电阻 R28的大小可以对驱动电流进行设置,当阻值为 51 Ω 时,驱动电流约为 60 mA。时延模块由一个 LC 延时电路构成,LC 电路的参数决定了Tdelay,因此需要综合考虑位时延 Tbit和环网时延 Tring来确定。由于 FR05MHIR 光接收器具有反相特性,因此在 LCU 与电流驱动之间加入非门,采用了反相的光发射电路。
3 充电桩嵌入式软件开发
充电桩在硬件结构上,主要由微控制器、射频读写器模块、电源模块,以及电量采集、刷卡设备、摄像头( 用于录入付款码等) 、打印机、显示器等外围接口组成。充电桩的采集信息主要包括用户信息和充电桩的充电信息。这些设备由充电桩内部的微控制器统一管
理。
如图 3 所示,通信装置硬件核心为 ARM微控制器,微控制器通过 RS485-TTL 接口与智能电表通信,还可以完成读取 IC 卡、控制继电器模块、存储卡的写入和读取等功能。触摸屏与微控制器的 FMC( Flexible Memory Controller) 接口连接,从而实现页面的展示以 及触摸信号的上传。摄像头连接微控制器的 DCMI ( Digital Camera Interface) 接口,实现付款码的录入功能。针式打印机与 IC 卡刷卡机以及电压/电流传感器均使用串口收发数据。
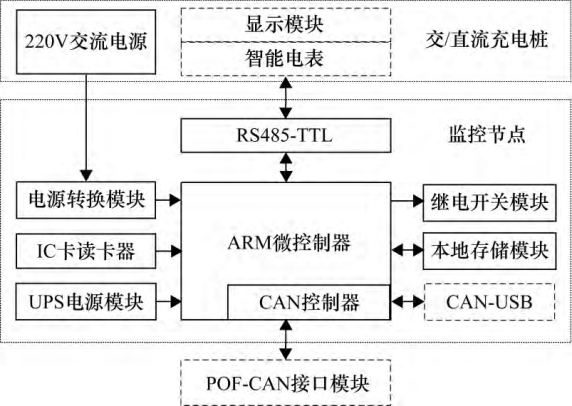
图 3 基于 POF-CAN 通信的监测装置硬件结构图
同时,微控制器通过 CAN 接口接入 CAN-POF 总线,实现与监测主站的数据交互。嵌入式软件运行流程如图 4 所示。
下位机软件采用多线程方式运行,以中断为主要程序驱动方式。对于定时完成的任务,由微控制器内部的时钟中断请求完成。时钟中断主要包括定时获取传感器数据、定时上传系统运行数据等。外部中断主要为用户操作请求,如屏幕二维码扫描完成、用户刷卡操作或其他命令输入等,对于不同的中断,软件执行不同任务。对于外部中断,系统判断中断类型后执行任务。
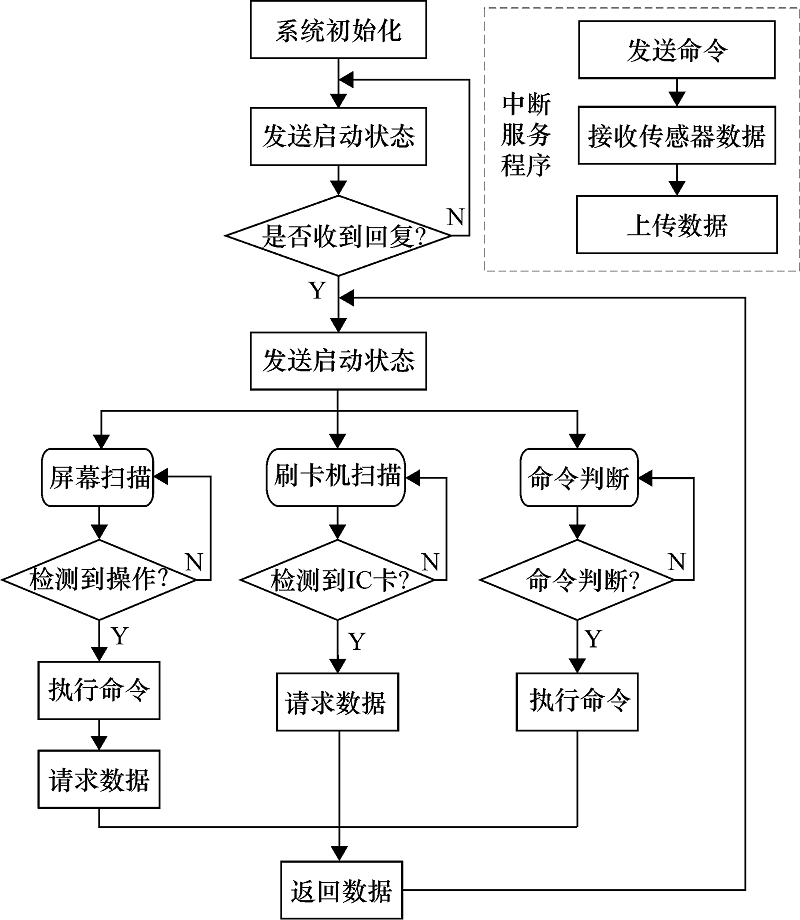
图 4 充电桩嵌入式软件流程图
4 CAN 应用层协议制定
根据电动汽车充电站的通信需求,须制定系统CAN 应用层协议。具体传输信息包括用户车辆信息( 用户身份、车牌、账户信息) 、电动汽车电池型号、充电方式、充电时间( 包括预计结束时间) 、充电电量等。
4.1 充电桩节点报文
在大型充电站的应用场景下,需要实现对所有充电桩与用户数据的管理。首先,下位机向上位机报告其所有硬件所处状态,便于上位机对其进行监控,上位机通过图表等方式将数据展示给工作人员,并生成故障日志; 其次,对于用户操作,下位机应能够实时地将数据传送给上位机,并由上位机请求服务器数据,完成对用户操作的实时响应[9],并上传主站。监测系统通信从站报文格式如图 5 所示。

图 5 充电桩节点报文帧格式
CAN 总线的数据帧最多为 8 个字节,所以采用多帧发送模式进行传输,将从站的报文分为 3个数据帧进行传输。
4.2 监测主站报文
监测主站的报文主要是数据信息。数据信息主要为用户数据,包括用户编号、当前可用余额、用户充电时间、地点等。上位机需要将数据上报给服务器或云端,方便用户或管理员查看。为了方便云端对充电桩进行统一管理,每一个充电桩是否正在被使用的信息都需要上传至云端,用户通过手机即可查看附近的可用充电桩并进行预约。
5 实验验证
为了科学地验证 POF-CAN 总线能够满足系统通信实时可靠的性能要求,在南网电科院及中电电力实验室构建了包含主从站的虚拟充电站系统,对通信传输的可靠性与 CAN 应用层协议制定的正确性和有效性进行了验证实验。在虚拟充电站系统中,虚拟主站通过 POF-USB 通信接口与 POF-CAN 环网实现组网通信,监测了 3 个虚拟从站节点的实时运行状态。虚拟从站节点( 基于 ARM 微控制器实现) 模拟充电桩,监测了系统运行过程中的用户预约启动、用户信息采集、电量信息采集、停止充电等充电桩运行状态。同时模拟了实际监测系统运行中的数据传输过程,实现了监测主站和充电桩/站报文数据的交互,包括电量监测、数据采集、IC 卡交互等信息。温湿度实验中采用 ESS-1000L 控温控湿箱。
温度的选取点为 - 10 ℃、- 5 ℃、5 ℃、10 ℃、15 ℃、20 ℃、 25 ℃、30 ℃、35 ℃、40 ℃、50 ℃、60 ℃。湿度的选取点为 10% RH、25% RH、40% RH、55% RH、70% RH、85% RH、95% RH。
交流磁场采用 MFAC-001 型多功能磁场测试仪、MFA-101A 磁场天线。交流磁场场强依次为 0. 36 mT、0. 5 mT、0. 63 mT。恒定磁场采用尺寸为 50 mm × 50 mm × 50 mm 的 300 mT 磁铁。
射频电磁场辐射抗扰度试验中,采用 EMC-RC 测试系统,抗扰性电平设置为 10 V /m,要求模块在标准试验与抗扰性电平下能正常工作。图 6 为 EMC-RC 系统现场。

图 6 EMC-RC 系统现场
无线电传导骚扰限制试验中,模块处于典型工作状态,其置于高 0. 8 m 的绝缘桌上,绝缘桌在转台上进行 360°旋转。同时,测量天线在 1 ~ 4 m 高度上升或下降,以便能够使具有准峰值检波器的接收机测量到最大辐射骚扰值。采用了 0. 4 ~ 30 MHz 的骚扰信号,骚扰信号的平均峰值约为 58 μV /m。图 7 为无线电传导骚扰限制试验信号。
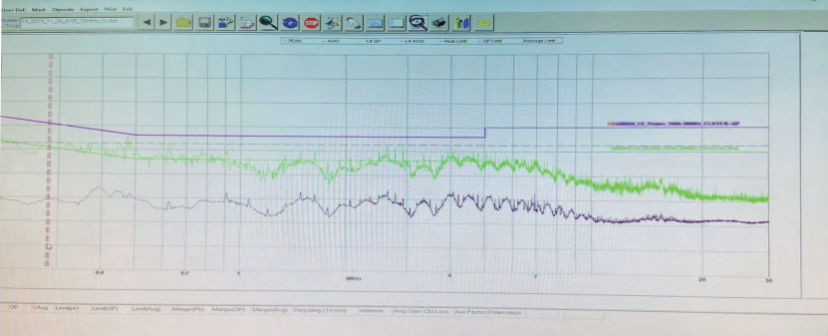
图 7 无线电传导骚扰限制试验信号
上述各项实验中,通信成功率均达到 100% 。
6 安科瑞交直流电动汽车充电桩运营收费管理解决方案
6.1概述
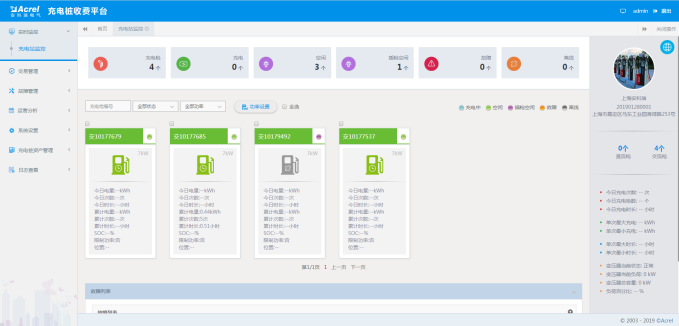
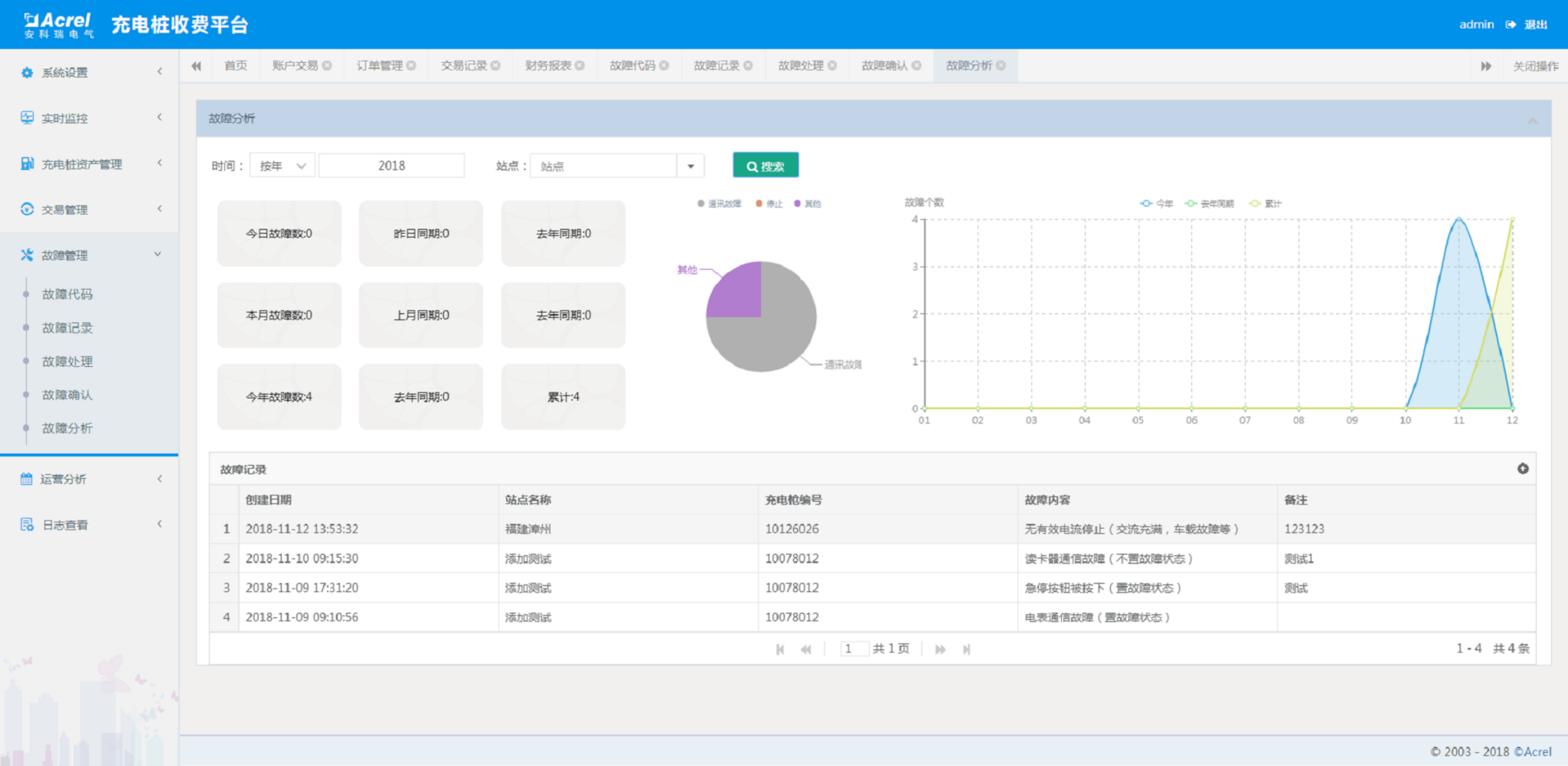
安科瑞Acrelcloud-充电桩收费运营云平台系统通过物联网技术对接入系统的充电桩站点和各个充电桩进行不间断地数据采集和监控,同时对各类故障如充电机过温保护、充电机输入输出过压、欠压、绝缘检测故障等一系列故障进行预警;用户通过微信小程序扫描二维码,进行支付后,系统发起充电请求,控制二维码对应的充电桩完成电动汽车的充电过程。
充电桩可选配WIFI模块或GPRS模块接入互联网,配合加密技术和秘钥分发技术,基于TCP/IP的数据交互协议,与云端进行直连。云平台包含了充电收费和充电桩运营的所有功能,包括财务管理、变压器监控和运营分析等功能。
6.2应用场所
(一)商场、小区等物业环境;
(二)学校,医院等公建;
(三)各类企事业单位;
(四)公交枢纽,公路充电站。
6.3平台结构

6.4平台主要功能
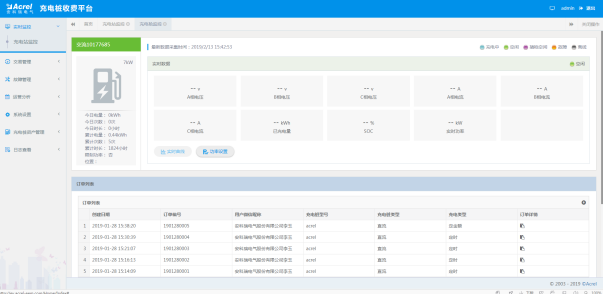
(一)资源管理
充电站档案管理,充电桩档案管理,用户档案管理,充电桩运行监测,充电桩异常交易监测

(二)交易结算
充电价格策略管理,预收费管理,账单管理,营收和财务相关报表
(三)用户管理
用户注册,用户登录,用户帐户管理,消息管理
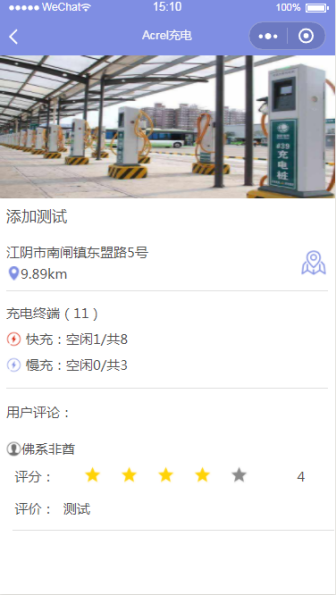
(四)充电服务
充电设施搜索,充电设施查看,地图寻址,在线自助支付充电,充电结算,导航等
(五)微信小程序
扫码充电,账单支付等功能

(六)数据服务
数据采集,短信提醒,数据存储和解析

(七)变压器监控
监控充电站变压器负荷,超负荷时对充电桩的调度管理
6.5平台硬件配置
平台服务器:建议按照我方推荐配置购买,或者客户自己租用阿里云资源。
推荐硬件配置清单:(如申请阿里云可忽略)
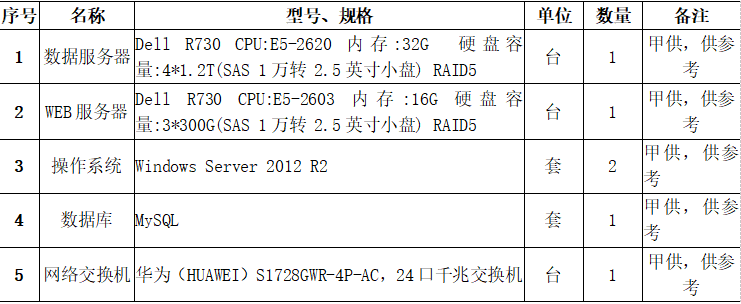
若客户自己租用阿里云服务器,服务器配置根据充电枪点数的不同,分别如下:

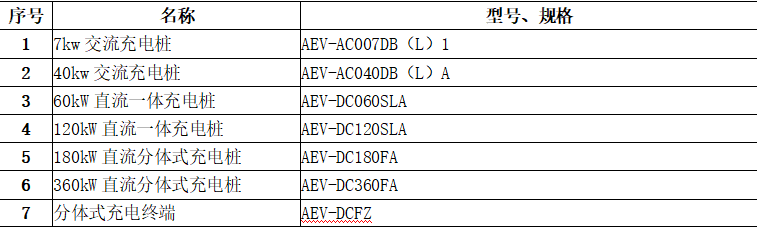
6.6推荐现场汽车充电桩配置
7 结束语
由于 POF 具有优良的物理特性,采用 POF-CAN总线的充电站监测系统能够提高现场布线、安装的灵活性,同时采用全光链路的信号传输方式能减小外部环境中电磁噪声对通信的干扰。这一结构以现场服务器为核心,能有效地对充电桩进行数据管理与运行控制。在实验室环境下搭建的虚拟充电桩/站实验平台上进行测试,结果表明 POF-CAN 总线能够满足电动汽车充电站通信系统可靠性和实时性的要求。
在进一步实际应用过程中,根据电动汽车用户和充电站运营商更丰富的功能需求,对通信协议和上下位机进行功能扩展,能够实现更多样化的数据传输。
参考文献:
[1]杨晶.电动汽车智能充电桩的设计[J].电子技术与软件工程,2019(11):214-215.
[2邓 凯,罗 敏,杜 蕙,易 斌,方彦军.基于 POF-CAN 通信总线的充电桩 /站监测系统的设计
[3]安科瑞企业微电网设计与应用手册.2020.06月版.
[4]智能电网用户端电力监控/电能管理/电气产品报价手册.2020.06月版.
作者简介:仇婉蓉,女,本科,安科瑞电气股份有限公司,主要从事汽车充电桩的研发和应用。Email:2881780372@qq.com;手机:18702105278;QQ:2881780372.